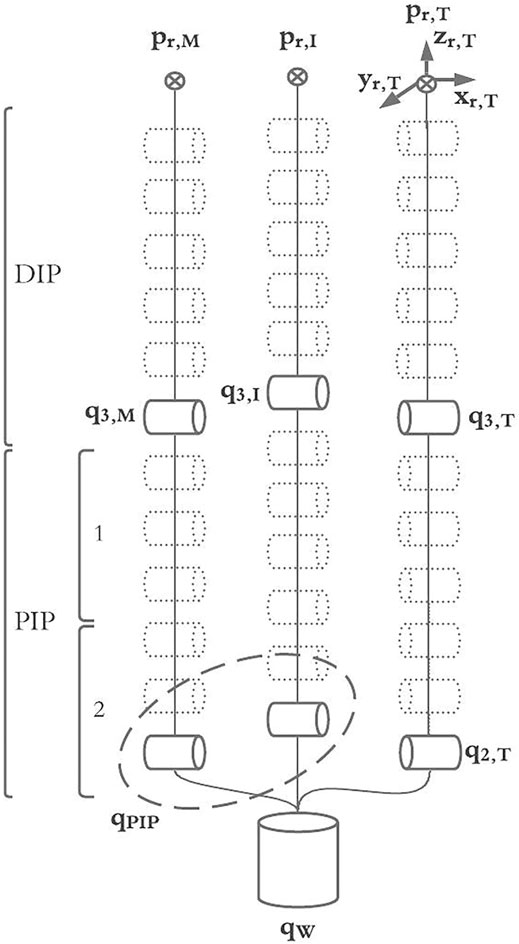
Kinematic model of a hand: each finger has 3 joints with 4 DoF : index
By A Mystery Man Writer
Last updated 17 Jul 2024

Integrated linkage-driven dexterous anthropomorphic robotic hand

1: The 25-DOF hand. Posterior view of right hand.

Mine Sarac

InverseKinematics
Frontiers A Human Gesture Mapping Method to Control a Multi‐Functional Hand for Robot‐Assisted Laparoscopic Surgery: The MUSHA Case

Your Ring Finger And Index Finger Reveal Whether You Are – Otosection
Kinematic model of a hand: each finger has 3 joints with 4 DoF : index

A) Sensor placement location on hand. (B) Kinematic hand model

Massimiliano Solazzi's research works Scuola Superiore Sant'Anna, Pisa (SSSUP) and other places

Machines, Free Full-Text

Applied Sciences, Free Full-Text

PDF) Design Requirements of Generic Hand Exoskeletons and Survey of Hand Exoskeletons for Rehabilitation, Assistive or Haptic Use

Kinematic schematic of various chains in the hand exoskeleton system.

Stable, simultaneous and proportional 4-DoF prosthetic hand control via synergy-inspired linear interpolation: a case series, Journal of NeuroEngineering and Rehabilitation
Recommended for you
-
 Hand and Fingers Vocabulary - Funky English17 Jul 2024
Hand and Fingers Vocabulary - Funky English17 Jul 2024 -
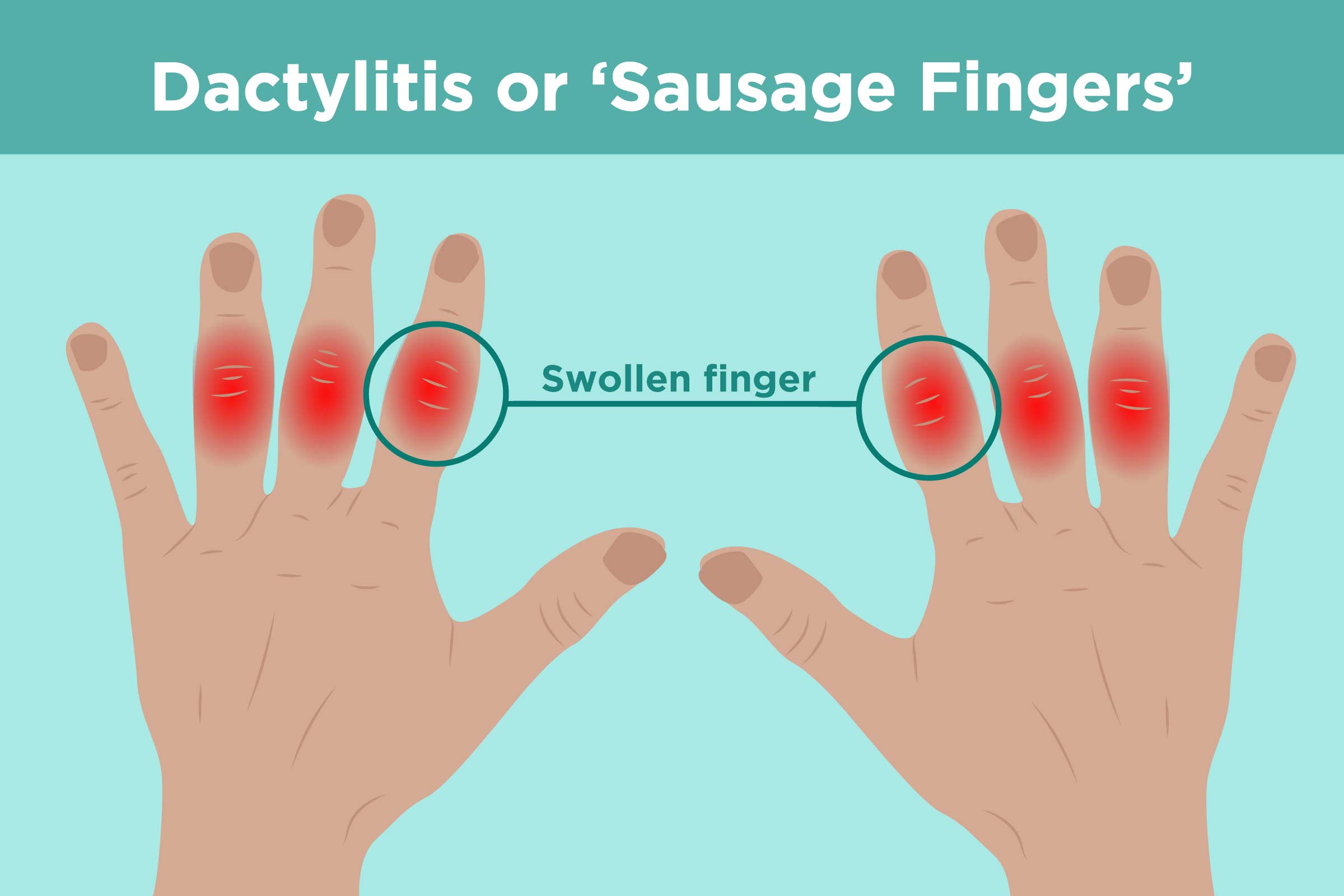 What Is Dactylitis? Understanding Causes, Symptoms, and Treatments17 Jul 2024
What Is Dactylitis? Understanding Causes, Symptoms, and Treatments17 Jul 2024 -
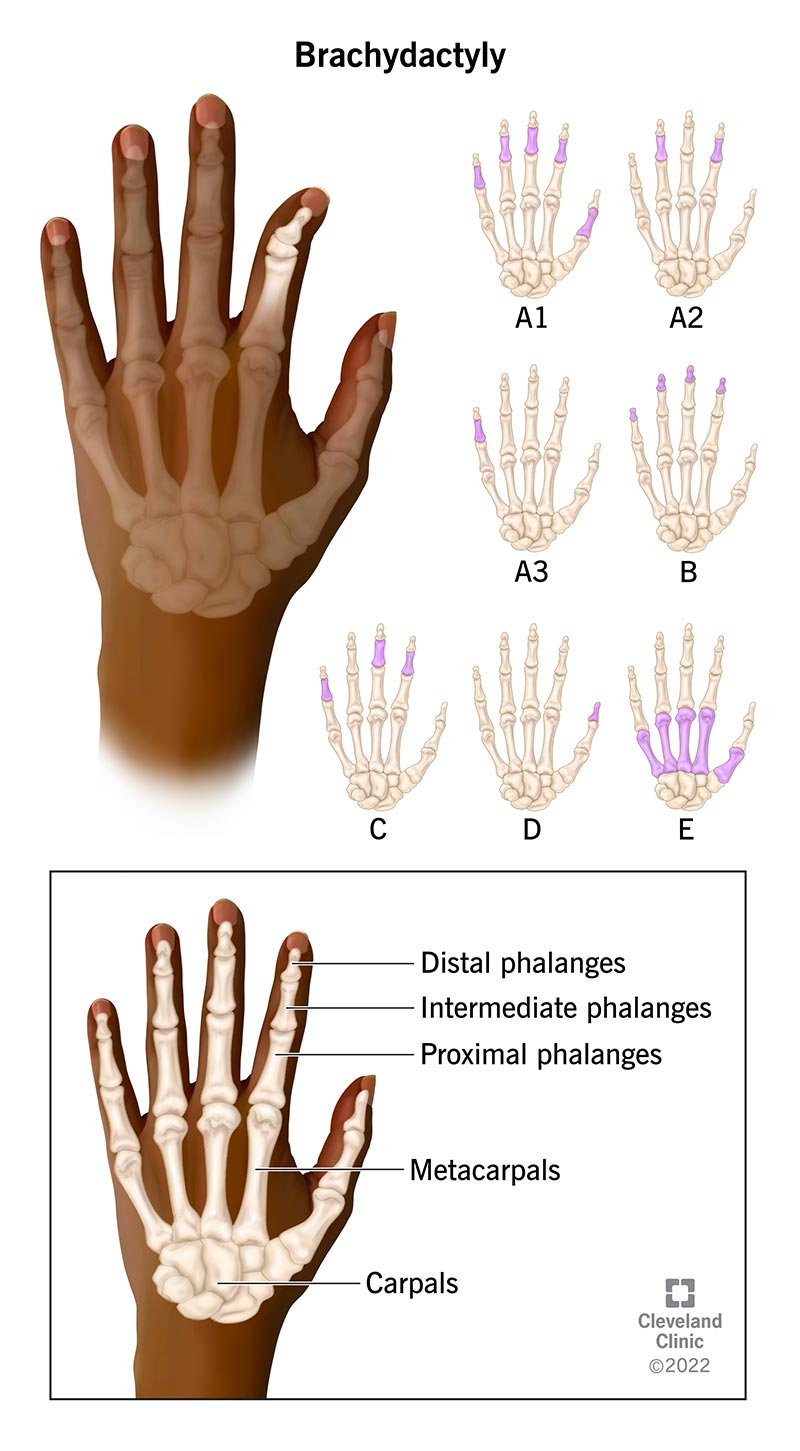
Brachydactyly Types - Causes & Outlook17 Jul 2024
-
 Finger pain: Causes, treatment, and self-care17 Jul 2024
Finger pain: Causes, treatment, and self-care17 Jul 2024 -
Kinematic model of a hand: each finger has 3 joints with 4 DoF : index17 Jul 2024
-
 Trigger Finger: Causes, Symptoms, & Treatment17 Jul 2024
Trigger Finger: Causes, Symptoms, & Treatment17 Jul 2024 -
 A Guide to wear Rings for Men: What Rings Mean on Each Finger - Statement Collective17 Jul 2024
A Guide to wear Rings for Men: What Rings Mean on Each Finger - Statement Collective17 Jul 2024 -
 Treatment Options for Trigger Finger and Trigger Thumb17 Jul 2024
Treatment Options for Trigger Finger and Trigger Thumb17 Jul 2024 -
 Make a Finger Trap From Newspaper - The New York Times17 Jul 2024
Make a Finger Trap From Newspaper - The New York Times17 Jul 2024 -
Children's finger length points to mothers' i17 Jul 2024
You may also like
-
 BEST and WORST AIR DRY CLAYS!?! Testing 5 Clays (Amaco, Creative Paperclay, Crayola, Das & Jovi)17 Jul 2024
BEST and WORST AIR DRY CLAYS!?! Testing 5 Clays (Amaco, Creative Paperclay, Crayola, Das & Jovi)17 Jul 2024 -
 Hprt Mt800q A4 Portable Thermal Transfer Printer Wireless&USB Connect with Mobile Computer Support 8.5'' x 11'' Letter for Office School Car Travel17 Jul 2024
Hprt Mt800q A4 Portable Thermal Transfer Printer Wireless&USB Connect with Mobile Computer Support 8.5'' x 11'' Letter for Office School Car Travel17 Jul 2024 -
 Dealovy Canvas Tape, Tent Repair Tape, Canvas Repair Tape17 Jul 2024
Dealovy Canvas Tape, Tent Repair Tape, Canvas Repair Tape17 Jul 2024 -
 Tombow Fudenosuke Brush Pen - Hard Tip (1 pc) – BrookeEvahPrints17 Jul 2024
Tombow Fudenosuke Brush Pen - Hard Tip (1 pc) – BrookeEvahPrints17 Jul 2024 -
 Lover - Taylor Swift - Sticker17 Jul 2024
Lover - Taylor Swift - Sticker17 Jul 2024 -
 3pcs Waterproof Fitted Sheet Set, Anti-slip Mattress Protector, Soft Comfortable Breathable Solid Color Bedding Set, For Bedroom, Guest Room (1* Fitted Sheet + 2*Pillowcases, Without Core) Twin , Full , Queen , King Size17 Jul 2024
3pcs Waterproof Fitted Sheet Set, Anti-slip Mattress Protector, Soft Comfortable Breathable Solid Color Bedding Set, For Bedroom, Guest Room (1* Fitted Sheet + 2*Pillowcases, Without Core) Twin , Full , Queen , King Size17 Jul 2024 -
 Single Hole Puncher Metal 3mm/6mm Pore Diameter Punch Pliers Hand17 Jul 2024
Single Hole Puncher Metal 3mm/6mm Pore Diameter Punch Pliers Hand17 Jul 2024 -
 Design Your Own Doll Patterns • Oombawka Design Crochet17 Jul 2024
Design Your Own Doll Patterns • Oombawka Design Crochet17 Jul 2024 -
 500pcs Micro Link Rings Beads Plier Hook Pulling Needle Tools 2 pcs Pulling Needle +holes17 Jul 2024
500pcs Micro Link Rings Beads Plier Hook Pulling Needle Tools 2 pcs Pulling Needle +holes17 Jul 2024 -
 Jurassic World Sticker Collection - Includes Over 150 Stickers - 4 Sheets17 Jul 2024
Jurassic World Sticker Collection - Includes Over 150 Stickers - 4 Sheets17 Jul 2024